Энергия взаимодействия двух тел. Гравитационная потенциальная энергия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами т и М ,находящихся на расстоянии r одна от другой, равна
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞. Потенциальная энергия гравитационного взаимодействия тела массой т с Землей,где h – высота тела над поверхностью Земли, М 3 – масса Земли, R 3 – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
![]() (12)
(12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой т с Землей для малых высот h (h « R 3)равна
Е p = m∙g∙h ,
где – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т. к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
![]() (13)
(13)
где ![]() Отсюда
Отсюда
![]()
 (14)
(14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
А = –(Е р 2 – Е р 1). (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
Е р = А.
Тогда физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Механическая работа
- физическая величина, равная произведению модуля силы на модуль перемещения и косинус угла между нимиA=Fscosα (см. рис.). Работа - величина скалярная (число, не вектор). Измеряется работа в джоулях (Дж). 1 Дж - это работа, совершаемая силой в 1 Н на перемещение 1 м. В зависимости от направлений векторов силы (F) и перемещения (S) механическая работа может быть положительной, отрицательной или равной нулю. Например, если векторы и перпендикулярны, то cos900 = 0 и A = 0. Мощность машины или механизма - это отношение совершенной работы ко времени, в течение которого она совершена  . Измеряется мощность в ваттах (Вт), 1 Вт = 1 Дж/с. Простые механизмы: наклонная плоскость, рычаг, блок. Их действие подчиняется«золотому правилу механики»: во сколько раз выигрываем в силе, во столько же раз проигрываем в перемещении. (На практике совершаемая с помощью механизма полная работа всегда несколько больше полезной. Часть работы совершается против силы трения в механизме и перемещения его отдельных частей. Например, применяя подвижный блок, приходится дополнительно совершать работу по поднятию самого блока, веревки и по преодолению силы трения в оси блока. Поэтому для любого механизма полезная работа (AП) всегда меньше, чем полная, затраченная (AЗ). По этой причине КПД = AП/AЗ 100% любого механизма не может быть больше или хотя бы равен 100%).
. Измеряется мощность в ваттах (Вт), 1 Вт = 1 Дж/с. Простые механизмы: наклонная плоскость, рычаг, блок. Их действие подчиняется«золотому правилу механики»: во сколько раз выигрываем в силе, во столько же раз проигрываем в перемещении. (На практике совершаемая с помощью механизма полная работа всегда несколько больше полезной. Часть работы совершается против силы трения в механизме и перемещения его отдельных частей. Например, применяя подвижный блок, приходится дополнительно совершать работу по поднятию самого блока, веревки и по преодолению силы трения в оси блока. Поэтому для любого механизма полезная работа (AП) всегда меньше, чем полная, затраченная (AЗ). По этой причине КПД = AП/AЗ 100% любого механизма не может быть больше или хотя бы равен 100%).
Мощность - Мощностью N называют величину, равную отношению работы А к промежутку времени t, в течение которого эта работа была совершена:
Из формулы (3.11) следует, что в СИ единицей мощности яв-ляется 1 Дж/с (джоуль в секунду). Эту единицу иначе называют ватт (Вт), 1 Вт= 1 Дж/с.
Связь между мощностью и скоростью при равномерном движении найдем, подставив (3.10) в (3.11):
(Эта формула справедлива и для переменного движения, если под N понимать мгновенную мощность, а под V - мгновенную скорость). Если направление силы совпадает с направлением перемещения, то cosa=1 и N=Fv. Из последней формулы следует, что
Из этих формул видно, что при постоянной мощности двигателя скорость движения обратно пропорциональна силе тяги и наоборот. На этом основан принцип действия коробки скоростей (коробки перемены передач) различных транспортных средств.
 Консервативными называются силы, работа которых не зависит от формы траектории, а определяется только положением её начальной и конечной точек.
К классу консервативных относятся, например, гравитационные силы, упругие, силы электростатического взаимодействия.
Вычислим, например, работу, которую совершает сила тяжести при переходах частицы разными путями из положения 1 в положение 2 (рис. 6.2). Если этот переход произошёл по вертикали, то работа силы :
Консервативными называются силы, работа которых не зависит от формы траектории, а определяется только положением её начальной и конечной точек.
К классу консервативных относятся, например, гравитационные силы, упругие, силы электростатического взаимодействия.
Вычислим, например, работу, которую совершает сила тяжести при переходах частицы разными путями из положения 1 в положение 2 (рис. 6.2). Если этот переход произошёл по вертикали, то работа силы :
 .
Так как по определению величина центральной силы есть функция только расстояния r, то значение определённого интеграла будет зависеть только от величин r1 и r2, и не будет зависеть от формы траектории.
Можно дать иное определение консервативной силы.
Рассмотрим перемещение частицы из положения 1 в положение 3 под действием консервативной силы .
Так как по определению величина центральной силы есть функция только расстояния r, то значение определённого интеграла будет зависеть только от величин r1 и r2, и не будет зависеть от формы траектории.
Можно дать иное определение консервативной силы.
Рассмотрим перемещение частицы из положения 1 в положение 3 под действием консервативной силы |
Установленный Ньютоном закон всемирного тяготения гласит:
ОПРЕДЕЛЕНИЕ: Гравитационная сила илисила тяготения – это сила, с которой две материальные точки притягивают друг друга, пропорциональная массам этих точек и обратно пропорциональная квадрату расстояния между ними, где– гравитационная постоянная. Эта сила направлена вдоль прямой, проходящей через взаимодействующие материальные точки.
Рассмотрим два тела массами m 1 ,m 2 (считаем их материальными точками) и будем их сближать от расстоянияr 1 доr 2 .
Элементарная
работа на пути dr
будет .
Полная работа
.
Полная работа
 .
.
Т.е.
 .
Величина
.
Величина
 (3.11)
(3.11)
называется потенциальной энергией тела в поле всемирного тяготения.
Если между телами действует сила притяжения, то U p <0;
если между телами действует сила отталкивания, то U p >0.
Из выражения (3.11) следует, что максимальное значение потенциальной энергии тяготеющие тела будут иметь тогда, когда они бесконечно (r=) удалены друг от друга (U p = 0).
Введем величину называемую потенциалом гравитационного поля.
ОПРЕДЕЛЕНИЕ: Потенциал – это скалярная величина, численно равная работе по перемещению в гравитационном поле тела единичной массы из данной точки поля на бесконечность (r=).
 ;
; или
или .
Поле можно характеризовать потенциальной
энергией, которой обладает в данном
месте материальная точка.
.
Поле можно характеризовать потенциальной
энергией, которой обладает в данном
месте материальная точка.
Получаем,
что
 .
Зная потенциал, можно вычислить работу,
совершаемую над частицей массой «m»
силами поля при перемещении ее из
положения 1 в положение 2:.
.
Зная потенциал, можно вычислить работу,
совершаемую над частицей массой «m»
силами поля при перемещении ее из
положения 1 в положение 2:.
В потенциальном поле можно провести поверхность, имеющую одинаковый потенциал. Такая поверхность называется эквипотенциальной .
3.12. Потенциальная энергия упруго деформированного тела.
Потенциальной энергией может обладать не только система взаимодействующих тел, но и отдельно взятое упруго деформированное тело (например, сжатая пружина, растянутый стержень и т.п.). В этом случае потенциальная энергия зависит от взаимного расположения отдельных частей тела (например, от расстояния между соседними витками пружины).
Определим
работу, которую необходимо затратить
для растяжения (или сжатия) пружины на
величину «x» (рис.3.8). Будем
считать, что пружина подчиняется закону
Гука, т.е. упругая сила пропорциональна
деформации. Будем проводить растяжение
пружины очень медленно, чтобы силу ,
с которой мы действуем на пружину, можно
было все время считать равной по величине
упругой силе
,
с которой мы действуем на пружину, можно
было все время считать равной по величине
упругой силе .
Далее будем считать, что сила действует
в направлении перемещения, т.е.
.
Далее будем считать, что сила действует
в направлении перемещения, т.е. .
.
И

 Рис.
3.9
Рис.
3.9
Пусть
под действием силы
 пружина растянулась наdx
,
тогдаdA
=
F
·
dx
=
k
·
x
·
dx
.
пружина растянулась наdx
,
тогдаdA
=
F
·
dx
=
k
·
x
·
dx
.
 ;
;
Эта работа идет на увеличение потенциальной энергии пружины. В предположении, что потенциальная энергия недеформированной пружины равна «0» (U 1 = 0) получаем
 (3.12)
(3.12)
– потенциальная энергия упругой деформации пружины.
3.13. Закон сохранения энергии.
Без
нарушения общности рассмотрим систему,
состоящую из двух частиц массами m 1 иm 2 . Пусть частицы
взаимодействуют друг с другом с силами и
и ,
модули которых зависят от расстоянияR 12 между частицами.
Установлено, что такие силы являютсяконсервативными
, т.е. работа,
совершаемая такими силами над частицами,
определяется начальной и конечной
конфигурациями системы. Пусть также,
кроме внутренних сил на первую частицу
действует внешняя консервативная сила
,
модули которых зависят от расстоянияR 12 между частицами.
Установлено, что такие силы являютсяконсервативными
, т.е. работа,
совершаемая такими силами над частицами,
определяется начальной и конечной
конфигурациями системы. Пусть также,
кроме внутренних сил на первую частицу
действует внешняя консервативная сила и внешняя неконсервативная сила
и внешняя неконсервативная сила .
Аналогично для второй частицы. Тогда
уравнения движения частиц можно записать
в виде:
.
Аналогично для второй частицы. Тогда
уравнения движения частиц можно записать
в виде:

Умножим
каждое уравнение на
 и сложим полученные выражения.
и сложим полученные выражения.

1. Распишем первый член в правой части.
Работа внутренних сил
равна
.
Для замкнутой системы ,
а
,
а ,
где
,
где и
и – радиус-векторы частиц.
– радиус-векторы частиц.
Учитывая,
что силы
 и
и имеют величину, зависящую только от
расстояния и направлены вдоль соединяющей
их прямой (это справедливо, например,
для сил кулоновского или гравитационного
взаимодействий), любую из этих сил можно
представить в виде, например,
имеют величину, зависящую только от
расстояния и направлены вдоль соединяющей
их прямой (это справедливо, например,
для сил кулоновского или гравитационного
взаимодействий), любую из этих сил можно
представить в виде, например, ,
гдеf
(R
12 )
– некоторая функцияR
12 ,
,
гдеf
(R
12 )
– некоторая функцияR
12 , – орт вектора
– орт вектора .
.
Следовательно,
 .
.
Скалярное
произведение
 равно приращениюdR
12 расстояния между частицами, тогда
равно приращениюdR
12 расстояния между частицами, тогда .
.
Выражение
 есть приращение некоторой функции
есть приращение некоторой функции .
Следовательно,
.
Следовательно,
 .
.
Функция
 представляет потенциальную энергию
взаимодействия.
представляет потенциальную энергию
взаимодействия.
Работа внутренних сил будет равна
 ,
,
т.е. не зависит от пути,
по которому перемещаются частицы, а
определяется начальной и конечной
конфигурациями системы. Т.е. силы
взаимодействия вида
 являются консервативными.
являются консервативными.
Итак, работа внутренних сил равна убыли потенциальной энергии взаимодействия

2. Второй член представляет работу внешних сил и равен убыли потенциальной энергии системы во внешнем поле консервативных сил

3.
Последний член представляет работу
неконсервативных внешних сил
 .
.
После этих замечаний можно записать
Величина
T + U вз. + U вн. = E (3.13)
– называется полной
механической энергией системы. Если
внешние неконсервативные силы отсутствуют,
т.е.
 ,
то
,
то
Е=const– закон сохранения механической энергии.
ОПРЕДЕЛЕНИЕ: полная механическая энергия системы тел, на которые действуют лишь консервативные силы, остается постоянной.
Для замкнутой системы, т.е. системы, на тела которой не действуют никакие внешние силы, закон сохранения примет вид:
E = T + U вз. = const
Если в замкнутой системе, кроме консервативных сил действуют неконсервативные силы, например, силы трения, то полная механическая энергия системы не сохраняется. Рассматривая консервативные силы как внешние, получим
или после интегрирования
 .
.
Анализ закона сохранения показывает, что полная энергия, оставаясь в консервативной системе величиной постоянной, может переходить из одних видов в другие.
При действии неконсервативных сил возможен переход механической энергии в другие немеханические виды энергии. В этом случае справедлив более общий закон сохранения:
ОПРЕДЕЛЕНИЕ: в изолированной от любых внешних воздействий системе остается постоянной сумма всех видов энергии (включая и немеханические).
К этому добавим, что в природе и технике постоянно имеют место превращения энергии из одних видов в другие. Проиллюстрируем это таблицей.
|
Процесс или прибор |
Превращение энергии |
|
|
Электрогенератор |
механическая |
электрическая |
|
Гальванический элемент |
химическая |
электрическая |
|
Электродвигатель |
электрическая |
механическая |
|
Зарядка аккумулятора |
электрическая |
химическая |
|
Фотосинтез |
электромагнитная |
химическая |
|
Фотоэффект |
электромагнитная |
электрическая |
|
Ядерный реактор |
механическая электромагнитная и др. |
|
В
 Рис.
3.10
Рис.
3.10
Для графического изображения закона сохранения энергии рассмотрим случай, когда тело бросаем вверх.
Если не учитывать силу сопротивления воздуха F сопр. , то систему «тело-Земля» можно рассматривать, как изолированную и консервативную, для которой
E = E к. + U p. = const
Из графика (рис. 3.10) видно, что по мере поднятия тела над поверхностью Земли его потенциальная энергия возрастает от величины U p (h 1) доU p (h 2), но одновременно с этим точно на такую же величину уменьшается кинетическая энергия системыE к. , а полная энергия тела остается величиной постоянной, что соответствует линииBA||h.
Очевидно:
1. При h=0 имеемU p =0, аE=E к. , что соответствует линии ОВ;
2. При h = max имеем U p = max (E к. = 0), аE=U p , что соответствует линииAC.
САМОСТОЯТЕЛЬНО:
Упругий и неупругий центральный удар шаров;
Условия равновесия механической системы.
В связи с рядом особенностей, а также ввиду особой важности вопрос о потенциальной энергии сил всемирного тяготения необходимо рассмотреть отдельно и более детально.
С первой особенностью мы сталкиваемся при выборе начала отсчета потенциальных энергий. На практике приходится рассчитывать движения данного (пробного) тела под действием сил всемирного тяготения, создаваемых другими телами разных масс и размеров.
Допустим, что мы условились считать равной нулю потенциальную энергию при таком положении, при котором тела соприкасаются. Пусть пробное тело А при взаимодействии по отдельности с шарами одинаковой массы, но разных радиусов, вначале удалено от центров шаров на одно и то же расстояние (рис. 5.28). Нетрудно видеть, что при движении тела А до соприкосновения с поверхностями тел силы тяготения совершат разную работу. Это значит, что мы должны при одинаковых относительных начальных расположениях тел считать потенциальные энергии систем различными.
Сопоставлять эти энергии между собой будет особо затруднительно в случаях, когда рассматриваются взаимодействия и движения трех или большего количества тел. Поэтому для сил всемирного тяготения ищется такой начальный уровень отсчета потенциальных энергий, который бы мог быть одинаковым, общим, для всех тел во Вселенной. Таким общим нулевым уровнем потенциальной энергии сил всемирного тяготения условились считать уровень, соответствующий расположению тел на бесконечно больших расстояниях друг от друга. Как видно из закона всемирного тяготения, на бесконечности обращаются в нуль и сами силы всемирного тяготения.
При таком выборе начала отсчета энергий создается непривычное положение с определением значений потенциальных энергий и проведением всех расчетов.
В случаях сил тяжести (рис. 5.29, а) и упругости (рис. 5.29, б) внутренние силы системы стремятся привести тела на нулевой уровень. При приближении тел к нулевому уровню потенциальная энергия системы уменьшается. Нулевому уровню действительно соответствует наименьшая потенциальная энергия системы.



Это означает, что при всех других положениях тел потенциальная энергия системы положительна.
В случае сил всемирного тяготения и при выборе нуля энергии на бесконечности все происходит наоборот. Внутренние силы системы стремятся увести тела от нулевого уровня (рис. 5.30). Они совершают положительную работу при удалении тел от нулевого уровня, т. е. при сближении тел. При любых конечных расстояниях между телами потенциальная энергия системы меньше, чем при Другими словами, нулевому уровню (при соответствует наибольшая потенциальная энергия. Это означает, что при всех других положениях тел потенциальная энергия системы отрицательна.
В § 96 было найдено, что работа сил всемирного тяготения при переносе тела из бесконечности на расстояние равна
Поэтому потенциальную энергию сил всемирного тяготения нужно считать равной
![]()
Эта формула выражает еще одну особенность потенциальной энергии сил всемирного тяготения - сравнительно сложный характер зависимости этой энергии от расстояния между телами.
На рис. 5.31 представлен график зависимости от для случая притяжения тел Землей. Этот график имеет вид равнобочной гиперболы. Вблизи поверхности Земли энергия меняется сравнительно сильно, но уже на расстоянии нескольких десятков земных радиусов энергия становится близкой к нулю и начинает меняться очень медленно.

Любое тело вблизи поверхности Земли находится в своеобразной «потенциальной яме». Всякий раз, когда оказывается необходимым освободить тело от действия сил земного притяжения, нужно прилагать специальные усилия для того, чтобы «вытащить» тело из этой потенциальной ямы.
Точно так же и все другие небесные тела создают вокруг себя такие потенциальные ямы - ловушки, которые захватывают и удерживают все не очень быстро движущиеся тела.
Знание характера зависимости от позволяет значительно упростить решение ряда важных практических задач. Например, необходимо послать космический корабль на Марс, Венеру или на любую другую планету Солнечной системы. Нужно определить, какая скорость должна быть сообщена кораблю при его запуске с поверхности Земли.
Для того чтобы корабль послать к другим планетам, его нужно вывести из сферы действия сил земного притяжения. Другими словами, нужно поднять его потенциальную энергию до нуля. Это становится возможным, если кораблю сообщить такую кинетическую энергию, чтобы он смог совершить работу против сил земного притяжения, равную где масса корабля,
![]()
масса и радиус земного шара.
Из второго закона Ньютона следует, что (§ 92)
Но так как скорость корабля до запуска равна нулю, то можно записать просто:
где скорость, сообщаемая кораблю при запуске. Подставляя значение для А, получим
![]()
Воспользуемся для исключения как это уже делали в § 96, двумя выражениями для силы земного притяжения на поверхности Земли:
![]()
Отсюда - Подставляя это значение в уравнение второго закона Ньютона, получим
Скорость, необходимая для вывода тела из сферы действия сил земного притяжения, называется второй космической скоростью.
Точно так же можно поставить и решить задачу о посылке корабля к далеким звездам. Для решения такой задачи нужно уже определить условия, при которых корабль будет выведен из сферы действия сил притяжения Солнца. Повторяя все рассуждения, которые были проведены в предыдущей задаче, можно получить такое же выражение для скорости, сообщаемой кораблю при запуске:
Здесь а - нормальное ускорение, которое сообщает Солнце Земле и которое может быть рассчитано по характеру движения Земли по орбите вокруг Солнца; радиус земной орбиты. Конечно, в этом случае означает скорость движения корабля относительно Солнца. Скорость, необходимая для вывода корабля за пределы Солнечной системы, называется третьей космической скоростью.
Рассмотренный нами способ выбора начала отсчета потенциальной энергии используется и при расчетах электрических взаимодействий тел. Представление о потенциальных ямах также широко используется в современной электронике, теории твердого тела, теории атома и в физике атомного ядра.
Энергией называется скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие.
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F ∙s . Модуль силы по второму закону Ньютона равен F = m∙a , а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ 1 и конечной υ 2 скорости и ускорения а выражением \(~s = \frac{\upsilon^2_2 - \upsilon^2_1}{2a}\) .
Отсюда для работы получаем
\(~A = F \cdot s = m \cdot a \cdot \frac{\upsilon^2_2 - \upsilon^2_1}{2a} = \frac{m \cdot \upsilon^2_2}{2} - \frac{m \cdot \upsilon^2_1}{2}\) . (1)
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела .
Кинетическая энергия обозначается буквой E k .
\(~E_k = \frac{m \cdot \upsilon^2}{2}\) . (2)
Тогда равенство (1) можно записать в таком виде:
\(~A = E_{k2} - E_{k1}\) . (3)
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
\(~A = E_{k2} - E_{k1}= \frac{m \cdot \upsilon^2}{2} - 0 = \frac{m \cdot \upsilon^2}{2}\) . (4)
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы , работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы , работа которых зависит от формы траектории, называются непотенциальными . При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
Найдем работу, совершаемую силой тяжести F т при перемещении тела массой m вертикально вниз с высоты h 1 над поверхностью Земли до высоты h 2 (рис. 1). Если разность h 1 – h 2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести F т во время движения тела можно считать постоянной и равной mg .
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
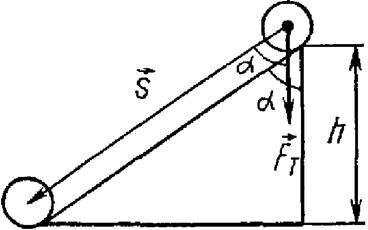
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести F т = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.
Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h ’, h ’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h 1 и h 2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С .

Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h 2 , в точку, расположенную на высоте h 1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
\(~A = - (E_{p2} - E_{p1})\) . (9)
Потенциальная энергия обозначается буквой Е p .
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Е p тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m , находящееся на высоте h , где h < h 0 (h 0 – нулевая высота), обладает отрицательной потенциальной энергией:
\(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М , находящихся на расстоянии r одна от другой, равна
\(~E_p = G \cdot \frac{M \cdot m}{r}\) . (11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, M e – масса Земли, R e – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
\(~E_e = G \cdot \frac{M_e \cdot m \cdot h}{R_e \cdot (R_e +h)}\) . (12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « R e) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac{M_e}{R^2_e}\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
\(~A = F_{upr-cp} \cdot (x_1 - x_2)\) , (13)
где \(~F_{upr-cp} = k \cdot \frac{x_1 - x_2}{2}\) . Отсюда
\(~A = k \cdot \frac{x_1 - x_2}{2} \cdot (x_1 - x_2) = k \cdot \frac{x^2_1 - x^2_2}{2}\) или \(~A = -\left(\frac{k \cdot x^2_2}{2} - \frac{k \cdot x^2_1}{2} \right)\) . (14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
\(~E_p = \frac{k \cdot x^2}{2}\) . (15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
\(~E_p = A\) .
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано . Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (17)
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
\(~A = E_{k2} - E_{k1}\) . (18)
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
\(~E_{k2} - E_{k1} = -(E_{p2} - E_{p1})\) или \(~E_{k1} + E_{p1} = E_{k2} + E_{p2}\) . (19)
Закон сохранения энергии в механических процессах :
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией .
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υ нач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Е p = m∙g∙h ). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Е k = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы :
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_{vn} = \Delta E = E - E_0\) . (20)
где Е и Е 0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения F r тела составляет π радиан, работа силы трения отрицательна и равна
\(~A_{tr} = -F_{tr} \cdot s_{12}\) ,
где s 12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения F tr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
\(~A_{tr} = F_{tr} \cdot s_{12}\) ,
Пример 1 . Пусть, внешняя сила F действует на брусок В , который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения F tr2 , действующей на тележку со стороны бруска, положительна:

Пример 2 . При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):

Литература
- Кабардин О.Ф. Физика: Справ. материалы: Учеб. пособие для учащихся. – М.: Просвещение, 1991. – 367 с.
- Кикоин И.К., Кикоин А.К. Физика: Учеб. для 9 кл. сред. шк. – М.: Про-свещение, 1992. – 191 с.
- Элементарный учебник физики: Учеб. пособие. В 3 т. / Под ред. Г.С. Ландсберга: т. 1. Механика. Теплота. Молекулярная физика. – М.: Физматлит, 2004. – 608 с.
- Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и самообразования. – М.: Наука, 1983. – 383 с.
Все тела, обладающие массой, притягиваются друг к другу с силой, подчиняющейся закону всемирного тяготения И. Ньютона. Следовательно, притягивающиеся тела обладают энергией взаимодействия (рис. 160).
Рис. 160
Покажем, что работа гравитационных сил не зависит от формы траектории, то есть гравитационные силы также являются потенциальными. Для этого рассмотрим движение небольшого тела массой m
, взаимодействующего с другим массивным телом массой М
, которое будем полагать неподвижным 1 (рис. 161).
рис. 161
Как следует из закона Ньютона, сила F
, действующая между телами, направлена вдоль линии, соединяющей эти тела. Поэтому при движении тела m
по дуге окружности с центром в точке, где находится тело М
, работа гравитационной силы равна нулю, так как векторы сил и перемещения все время остаются взаимно перпендикулярными. При движении вдоль отрезка, направленного к центру тела М
, векторы перемещения и силы параллельны, поэтому в этом случае при сближении тел работа гравитационной силы положительна, а при удалении тел − отрицательна. Далее заметим, что при радиальном движении работа силы притяжения зависит только от начального и конечного расстояний между телами. Так, при движении по отрезкам (рис. 162) DE
и D 1 E 1
совершенные работы равны, так как законы изменения сил от расстояния на обоих отрезках одинаковы. Наконец, произвольную траекторию тела m
можно разбить на набор дуговых и радиальных участков (например, ломаная ABCDE
).
рис. 162
При движении по дугам работа равна нулю, при движении по радиальным отрезкам работа не зависит от положения этого отрезка, следовательно, работа гравитационной силы зависит только от начального и конечного расстояний между телами, что и требовалось доказать.
Заметьте, что при доказательстве потенциальности мы воспользовались только тем фактом, что гравитационные силы являются центральными, то есть направленными вдоль прямой, соединяющей тела, и не упоминали о конкретном виде зависимости силы от расстояния. Следовательно, все центральные силы являются потенциальными.
Мы доказали потенциальность силы гравитационного взаимодействия между двумя точечными телами. Но для гравитационных взаимодействий справедлив принцип суперпозиции: сила, действующая на тело со стороны системы точечных тел, равна сумме сил парных взаимодействий, каждая из которых является потенциальной, следовательно, и их сумма также потенциальна. Действительно, если работа каждой силы парного взаимодействия не зависит от траектории, то и их сумма также не зависит от формы траектории. Таким образом, все гравитационные силы потенциальны
.
Нам осталось получить конкретное выражение для потенциальной энергии гравитационного взаимодействия.
Для вычисления работы силы притяжения между двумя точечными телами достаточно подсчитать эту работу при движении вдоль радиального отрезка при изменении расстояния от r 1
до r 2
(рис. 163).
рис. 163
Очередной раз воспользуемся графическим методом, для чего построим зависимость силы притяжения F = GMm/r 2
от расстояния r между телами. Тогда площадь под графиком этой зависимости в указанных пределах и будет равна искомой работе (рис. 164).
рис. 164
Вычисление этой площади представляет собой не слишком сложную задачу, требующее, однако, определенных математических знаний и навыков. Не вдаваясь в детали этого расчета, приведем конечный результат: для данной зависимости силы от расстояния площадь под графиком, или работа силы притяжения, определяется формулой
А 12 = GMm(1/r 2 − 1/r 1)
.
Так как мы доказали, что гравитационные силы являются потенциальными, эта работа равна уменьшению потенциальной энергии взаимодействия, то есть
А 12 = GMm(1/r 2 − 1/r 1) = −ΔU = −(U 2 − U 1)
.
Из этого выражения можно определить выражение для потенциальной энергии гравитационного взаимодействия:
U(r) = −GMm/r
. (1)
При таком определении потенциальная энергия отрицательна и стремится к нулю при бесконечном расстоянии между телами: U(∞) = 0
. Формула (1) определяет работу, которую совершит сила гравитационного притяжения при увеличении расстояния от r
до бесконечности, а так как при таком движении векторы силы и перемещения направлены в противоположные стороны, то эта работа отрицательна. При противоположном движении, при сближении тел от бесконечного расстояния до расстояния r
, работа силы притяжения будет положительна. Эту работу можно подсчитать по определению потенциальной энергии:
Подчеркнем, что потенциальная энергия является характеристикой взаимодействия, по меньшей мере, двух тел. Нельзя говорить о том, что энергия взаимодействия «принадлежит» одному из тел, или каким образом «разделить эту энергию между телами». Поэтому когда мы говорим об изменении потенциальной энергии, мы подразумеваем изменение энергии системы взаимодействующих тел. Однако в некоторых случаях допустимо все же говорить об изменении потенциальной энергии одного тела. Так, при описании движения небольшого, по сравнению с Землей, тела в поле тяжести Земли говорим о силе, действующей на тело со стороны Земли, как правило, не упоминая и не учитывая равную силу, действующую со стороны тела на Землю. Дело в том, что при громадной массе Земли изменение ее скорости исчезающее мало. Поэтому изменение потенциальной энергии взаимодействия приводит к заметному изменению кинетической энергии тела и бесконечно малому изменению кинетической энергии Земли. В такой ситуации допустимо говорить о потенциальной энергии тела вблизи поверхности Земли, то есть всю энергию гравитационного взаимодействия «приписать» небольшому телу. В общем случае, можно говорить о потенциальной энергии отдельного тела, если остальные взаимодействующие тела неподвижны.
Мы неоднократно подчеркивали, что точка, в которой потенциальная энергия принимается равной нулю, выбирается произвольно. В данном случае такой точкой оказалась бесконечно удаленная точка. В некотором смысле этот непривычный вывод может быть признан разумным: действительно, на бесконечном расстоянии исчезает взаимодействие − исчезает и потенциальная энергия. С этой точки зрения логичным выглядит и знак потенциальной энергии. Действительно, чтобы разнести два притягивающиеся тела, внешние силы должны совершить положительную работу, поэтому в таком процессе потенциальная энергия системы должна возрастать: вот она возрастает, возрастает и... становится равной нулю!
Если притягивающиеся тела соприкасаются, то сила притяжения не может совершать положительную работу, если же тела разнесены, то такая работа может быть совершена при сближении тел. Поэтому часто говорят о том, что притягивающиеся тела обладают отрицательной энергией, а энергия отталкивающихся тел положительна. Это утверждение справедливо только в том случае, если нулевой уровень потенциальной энергии выбирается на бесконечности. Так, если два тела связаны пружиной, то при увеличении расстояния между телами между ними будет действовать сила притяжения, тем не менее, энергия их взаимодействия является положительной. Не забывайте, что нулевому уровню потенциальной энергии соответствует состояние недеформированной пружины (а не бесконечность).
1 Вспомните, что сила гравитационного взаимодействия между сферически симметричными телами эквивалентна силе взаимодействия между точечными телами таких же масс.